One of our last projects is a new generation of professional robotic mounts, in altazimuth fork configuration with integrated derotator/focuser, in which we applied our last Direct Drive System technology.

10Micron AZ ROBOTIC MOUNTS AZ8000 and AZ5000, with DDS Technology
Thanks to our long experience in astronomical mounts, we are proud to offer this solution specially developed for professional applications such as both astronomical and satellite fields, which need a really demanding grade of quality and affordability; our AZ mounts integrate all the latest technologies and technical acquirements in mechanical, electrical, electronics, software and design fields: any single feature and component has been accurately studied in order to reach the highest level of efficiency that has always characterized 10Micron products; also, we have integrated some special features in order to ensure the safety of the instruments and the operators.
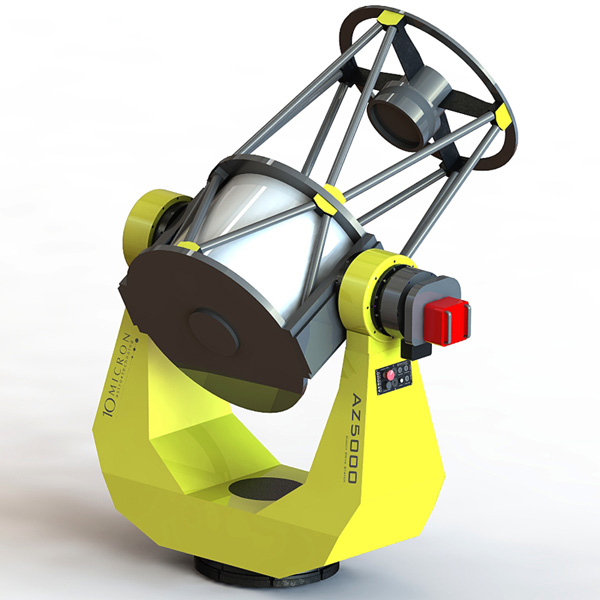
AZ5000 DDS-N with 24″ dedicated optics, Nasmyth focus configuration
Often, it happens that a potential customer asks: Why should I buy a 10micron HPS mount?
The short answer is: Because it works better, integrates a whole set of features that others haven’t and will not in the foreseeable future, has absolute encoders on both axes for the best accuracy, all of this is useful whatever others may say, and it will change forever your way of thinking about astronomical observation.
If you aren’t satisfied with the short answer, please read on.
HPS means “High Precision and Speed” and is the name for the new series of astronomical mounts by 10micron. The HPS mounts feature two high-precision absolute encoders mounted directly on each axis to ensure unprecedented pointing and tracking accuracy, and high performance servo motors and drivers for high speed pointing.
This radical performance improvement over previous technology enables a radical change in the workflow of observers and astroimagers. In the vast majority of applications, including long exposure deep-sky imaging, the need for autoguiding is eliminated. The pointing accuracy allows you to be confident that, once the mount is properly setup, objects will be centered in the smallest field of view, even with a mobile setup on a remote meadow in the mountains. Furthermore, the internal electronics allows the mount to do almost everything without the need for an external PC.
The absolute encoders provide high-accuracy, sub arcsecond feedback to the motion of the mount. The absolute encoders render the axes “live” and free to react also to any external forces like wind and vibrations or accidental contact. Furthermore, this feedback is provided regardless of any zeroing or homing procedure.
This means that the electronics will always know the position of the mount. You may move around the mount with the clutches unlocked and the electronics powered off, lock the clutches in any position and switch on the mount: the electronics will know where the telescope is looking. You may effectively use the mount as a Dobsonian telescope with manual pointing, retaining the full, sub- arcsecond accuracy of the encoders.
This means ease of use when operating in the field, since the setup procedure is much faster.
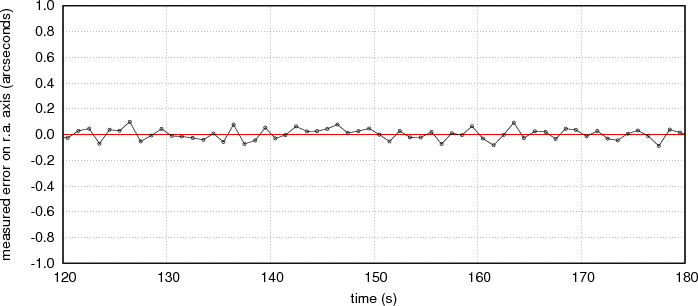
With regard to the right ascension axis, virtually all the mechanical error from the reduction gearing is eliminated. Not only the so-called “Periodic Error”, which comprises the periodic irregularities due to imperfection in the manufacturing and assembling of the worm, but also the non-periodic errors due to imperfections in the worm wheel, bearings, belts and so on.
With regard to the declination axis, it may seem that the encoder system is less important, since there is no sidereal tracking motion. The reality is that the declination axis is critical to sidereal tracking. If you want to compensate for refraction, telescope and mount flexure and so on, you will have to move the declination axis at very small speeds. Furthermore, while the right ascension axis works always at the same speed (plus or minus small corrections), the declination axis works always at near-zero speeds, with the occasional inversion of the direction of motion. This means that mechanical backlash, belt flexure and friction forces show in the declination axis, and you can’t count on any “Periodic Error Correction” to compensate for them. Tricks for minimizing the effect of these forces in traditional mounts require having very small preload on the worm, with the risk of uncontrolled motion when the telescope is subjected to even small external forces, because of the disengaging of the worm from the worm wheel; painstakingly calibrating software backlash compensation procedures; manually adjusting the meshing of gears. Or, maybe, introducing forcefully small alignment errors, to force autoguiding corrections always in the same direction. So, having an encoder mounted directly on-axis is at least as important in declination as in right ascension.
The task of tracking astronomical objects can be decomposed into several sub-tasks that we will discuss in the next paragraphs.
In order to obtain the sub-arcsecond tracking accuracy of HPS mounts, all of this must be taken into consideration. Furthermore, many “subtle” effects begin to show, and they need special attention.
An ideal equatorial mount has its right ascension axis pointed directly at the celestial poles. If there are errors with this, the mount will exhibit various pointing and tracking errors, in both axes, varying across the sky. So, with a typical mount that tracks objects by setting a constant velocity on its right ascension axis, it is of utmost importance to approach this ideal situation. There are many methods for achieving this, from the universal (but slow) Bigourdan method, to iterative methods exploiting the capabilities of computerized mounts, to the traditional polar scope (which is, anyway, more difficult to align and use correctly than you may think). Many computerized mounts allow you to point to one, two or three stars, with less and less assumptions on the correctness of the initial alignment, and compute the polar misalignment. This information is then used, at least, for pointing at objects. The HPS mounts can do the same, with the additional usage of this piece of information for correcting the tracking of objects. This means that tracking objects will always be correct, even if the mount is not aligned to the celestial pole. Of course, you may want to ensure a reasonably correct alignment to avoiding field rotation on long sequences of imaging. Various functions are provided by the 10micron firmware: even the number of turns you must apply to the adjustment handles for the azimuth and altitude is given. So we eliminated the polar scope, to the advantage of mechanical stiffness of the mount, since the initial alignment can be done with the mount misaligned even by many degrees from the pole, and approximately centering two bright stars in the eyepiece (using even manual movements, like in a Dobsonian), then centering a third star with the adjustment handles is much quicker than aligning the typical polar finder with date and time, compensating for longitude, and knee yourself to center the right star pattern for your hemisphere in its too-small field of view.
All of the above requires a reasonably accurate knowledge of time and your location on Earth. If you plan to reuse the alignment later (for example if you are in an observatory), you will have to keep the mount’s clock accurately synchronized and use very precise coordinates for your site. For this reason, beyond the usual data entries from the keypad or with an external PC, 10micron mounts support also reading all these data from an optional GPS module.
Of course, your telescope’s optical axis will not be perfectly perpendicular to the declination axis, and it will not be perfectly aligned with the zero angle of the absolute encoder. When you add the third star to the alignment procedure, these errors are automatically computed and corrected from now on.
We know that no mechanics is ideal. Even with high-accuracy encoders mounted directly on the axes, we still have the issue of mechanical flexure. In the great majority of mounts the mechanical errors are not dealt with at a software level. Of course, mechanical errors can minimize through careful designing and manufacturing. But, for example, if you allow for an error of one arcsecond during the exposure of an image, a little calculation will show that this error can be introduced by a deformation of a leg of the typical tripod of just 5 thousandths of a millimetre! A deformation like this can be easily caused just by moving around the barycentre of a non-perfectly balanced telescope.
So, the best thing we can do is to build a model that accounts for the mechanical flexure of the mount and telescope. We will have to point to various locations in the sky, and compare them against the encoder readout (i.e., the absolute angle set on the mount’s axes). With enough points, flexure can be modelled well enough to allow for high-precision pointing. As far as we know, no mount on the market allows this without the use of an external computer. With 10micron mounts, the procedure can be as simple as adding stars to the ones you already used for the initial alignment. Of course, this can be automated in a very efficient way by using external tools that point to a predefined set of locations in the sky, take a picture, measure the exact coordinates by a process called “plate solving” and feed the coordinates back to the mount. You can use up to 100 alignment stars/points for this task, and everything can be done in a surprisingly little amount of time, thanks to the high pointing speed.
Of course, all of this works if mechanical errors are repeatable. This means that, while mechanical flexure can be usually modelled with excellent accuracy, this doesn’t apply to mechanical play or backlash. The on-axis encoders ensure that no backlash in the mount will ever get in your way while creating a pointing model, tracking or pointing objects, while you have the task of eliminating flopping mirrors, loose focuser tubes and so on.
Earth’s atmosphere bends the rays of light from astronomical objects, depending on air density. This is called “atmospheric refraction”. With traditional mounts, often it is advised to point the right ascension axis to the refracted celestial pole, and set a special tracking speed (the so-called “king” speed) that compensates for the apparent speed difference due to refraction (in right ascension only).
10micron mounts allow for setting of the barometric pressure and atmospheric temperature, and even changing it during an observation session, in order to continuously correct their pointing and tracking to account for atmospheric changes. This can be done manually, with the keypad, or from an external PC.
As everybody knows, Earth rotates with respect to astronomical objects. By far, its main motion is the daily rotation. So, for being called an “equatorial mount”, often it is enough to provide a constant-rate rotation around the right ascension axis. This rate, usually, is given by a quartz clock, and so it should be reasonably accurate. What many don’t know is that typical quartz oscillators used in electronics (and also in your typical PC) are not temperature compensated. Furthermore, they aren’t extremely accurate anyway. At a fairly typical temperature of -5°C (23°F), which is not rare for astronomical observation, a typical quartz can have an error of tens of parts per million (ppm). Errors of 20 or 30 ppm are commonly observed, which would cause errors in right ascension accumulating at about 2.5 seconds per day, which means more than one arcsecond per hour. The loss of pointing precision in a 12-hour winter night would be of about 20 arcseconds, and much more if the mount is shut down and powered on days later. This can be corrected by keeping the mount always synchronized to an external time source, like a standard PC with its clock synchronized to the NIST time servers, or with the optional GPS module we already talked about. As of now, all of our motor drivers feature a battery-backed clock with temperature compensation, which is able to keep time with an accuracy of 3.5 ppm from –40°C to +40°C (–40°F to +104°F).
A much slower, but nevertheless fundamental, movement is the precession of equinoxes. If you don’t model the precession, you are forced to use standard coordinates (for example, when doing alignment). Some may think that if you make an alignment with J2000.0 coordinates, then you should be able to point objects using J2000.0 coordinates: nothing could be farther from reality! Precession changes the direction of the Earth’s rotation axis, i.e. the celestial pole, so this mean that the alignment would work… for a few minutes, then pointing accuracy would be destroyed. Some systems do not account for precession in their databases. By default, 10micron mounts work in JNOW when communicating with the outside, i.e. the coordinates you read and set in the keypad are referred to the true equinox of the date of observation. But everything is accounted for in the firmware. Yes, even nutation and light aberration.
Another factor which can limit the accuracy of the mount over long periods is the change in Earth’s rotation rate. What we call the “UTC time” is only an approximation to the angle of rotation of Earth. The angle of rotation of Earth is measured by UT1, if we neglect the pole wandering and seasonal variations, (that anyway amount to less than one arcsecond). UTC is based on atomic clocks, and sometimes a so-called “leap second” is inserted into it to maintain it within 0.9 seconds of UT1. So, when you approximate UT1 with UTC, you may introduce a difference of up to 14 arcseconds into your pointing accuracy. This difference changes very slowly, so that the degradation of pointing models (simply due to terrain creeping and other “very slow” things) is always faster than this change, and you will not notice any problem in practice. But when the leap second is inserted, you have a sudden jump in coordinates. So, we are going to implement a full accounting of UTC, UT1 and leap seconds since firmware revision 2.13.1.
Quite a number of astronomical objects exhibit a visible movement. Planets, asteroids, comets, and also artificial satellites of the Earth. The firmware of 10micron mounts can compute the motion of all these objects directly from their orbital parameters (except for planets, you will have to upload orbital parameters into the mount: you can do it before leaving for your preferred observation site). Artificial satellites are tracked via a special function which we invite you to explore. Solar system objects are tracked automatically on both axes by leaving the “Follow object” setting on. Please note that the Moon has an appreciable motion in declination that many mounts omit to account for, even if the “Moon tracking speed” is selected.
Autoguiding is simpler… for the mount manufacturer. For the user, autoguiding means additional trouble. In case you use an external guider scope, it means that you can’t compensate all flexures between the two instruments, and you have additional, heavy equipment. In case you use a dedicated guider camera, it means additional cabling, software installation and setup. In any case, it means additional trouble searching for suitable guide stars, looking for customized guiding software parameters, calibration. HPS mounts can be aligned to bright stars during twilight, then every second of darkness can be used for imaging. Furthermore, autoguiding is not always possible. The typical situation is imaging a faint, fast-moving comet. Anyway, if you still want / need autoguiding, HPS mounts provide a standard ST4 port, as well as all the usual settings and controls by remote software.
The HPS mounts feature a very rich database of objects, comprising not only the classical Messier and NGC/IC catalogues, but many catalogues of stars, including variables and doubles, and of deep-sky objects. Also, a catalogue of moon features is available and useful thanks to the high pointing accuracy.
The high speed of the mount is necessary, beyond speeding up the alignment procedures, for fast satellites catching (especially after a meridian crossing). Furthermore, it helps to reduce loss of time in research application, increasing the amount of data that can be obtained in the often short observing nights.
The HPS mounts feature a rich system of accessories for mounting various instruments. Even multiple instruments can be mounted on a single mount, in order to have the right imaging equipment always ready. Since the pointing and tracking model depends on the specific instrument (the flexure is different), the mount allows for different models, one for each instrument, that can be saved in the internal memory and reloaded when required.
Another useful feature, especially for heavier mounts, is the electronic balance function. With this function you may measure the unbalancing of the instrumentation and adjust accordingly. The high speed is very useful also to speed up this procedure.
The HPS mounts provide a great deal of connecting options. While you may choose the traditional RS-232 connection to control the electronics from an external PC, today you may prefer to dedicate it to controlling directly a computerized dome. The firmware will provide all the relevant computations even for mounts mounted off-center and instruments mounted with offset. The GPS port doubles as an additional RS-232 port, if you don’t use the GPS. But the best way of connecting the mount to your PC is using the LAN connection, via TCP/IP, or the Wireless connection. The mount can connect to an existing WLAN, or it can be used as an hotspot to which your PC, tablet or smartphone can connect.
The LAN connection offer superior high-voltage tolerance with respect to the typical RS-232 connection; this is even better with the WLAN which is… wireless. In case of remote observatories, which are subject to lightning, this may make the difference between a healthy electronics and a fried one!
The mount supports up to ten simultaneous TCP/IP connections, so you can use different software, and also different devices, at the same time. 10micron provides an ASCOM driver for Windows, but if you want to implement your own control system, we provide the command set that can be used both on the RS-232, LAN and WLAN connections. The command set is largely LX200 compatible, but includes many more functions and operating modes. In remote operation, you will appreciate also the additional security provided by the absolute encoders: in no case you will lose your alignment, even in case of slipping clutches.
he HPS mounts are able to operate up to 30° beyond the meridian, in both directions (this means, with the counterweight bar up, and the telescope down). This allows at least an arc of 60° for tracking every object, corresponding to at least four hours of tracking for objects crossing the meridian (provided that the object doesn’t set or encounter another limit). This amount is configurable from 0° to 30° to obtain the maximum flexibility. The mount will warn you when it is reaching tracking limits; at the limit, tracking will stop. You will have to point the object again to force a meridian flip.