Eines unserer aktuellsten Projekte ist eine neue Generation von professionellen robotic Montierungen in altazimutal Gabel Konfiguration mit integriertem derotator/focuser, in welchem wir unser aktuellstes Direct Drive System nutzen.

10micron AZ Robotic Montierung AZ8000 und AZ5000, mit DDS Technologie
Dank unserer langjährigen Erfahrung mit astronomischen Montierungen sind wir stolz, eine speziell entwickelte Lösung für professionelle Anwendungen im sowohl astronomischen als auch Satelliten-Bereich anbieten zu können, die hohen Qualitätsstandards genügt und bezahlbar ist.
Unsere AZ Montierungen integrieren alle aktuellsten Technologien und technischen Anschaffungen aus den Bereichen Mechanik, Elektrik, Elektronik, Software und Design: jedes einzelne Feature und jede Komponente wurde genau studiert, um das höchste Maß an Effizienz zu erreichen, was 10Micron Produkte immer charakterisiert hat. Außerdem haben wir spezielle Features integriert, um die Sicherheit der Instrumente und der Bediener sicher zu stellen.
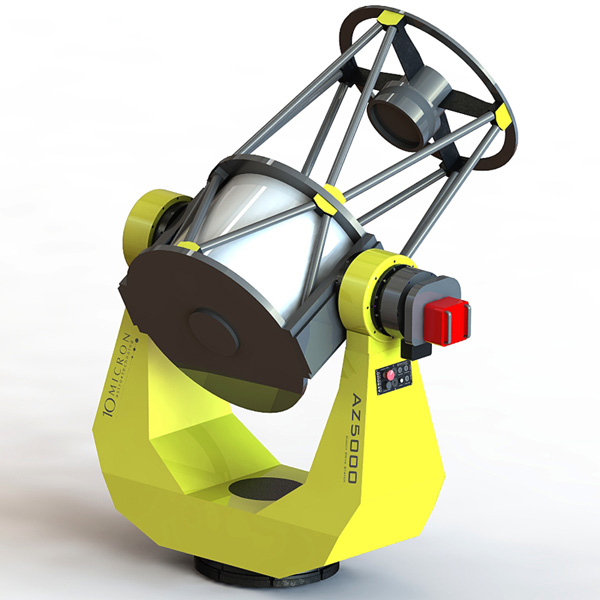
AZ5000 DDS-N mit 24” dedizierter Optik, Nasmyth Fokus Konfiguration
HPS Technologie
Oft kommt es vor, dass ein Kunde fragt: „Warum soll ich eine 10 Micron HPS Montierung kaufen?“
Die kurze Antwort ist: „Weil es besser funktioniert. Sie integriert ein ganzes Set an Features welches andere nicht haben und in der nächsten Zukunft auch nicht haben werden. Sie hat Absolut-Encoder an beiden Achsen für hohe Genauigkeit. All das ist nützlich. Andere sagen vielleicht, es wird für immer die Art, wie sie über astronomische Beobachtung denken, verändern.“
Wenn Sie mit dieser kurzen Antwort noch nicht zufrieden sein sollten dann lesen Sie bitte weiter.
HPS steht für “High Precision and Speed” (hohe Präzision und Geschwindigkeit) und ist der Name für diese neue Serie astronomischer Montierungen von 10 Micron.
Die HPS Montierungen verfügen über zwei hoch präzise Absolut-Encoder direkt auf jeder Achse, um noch nicht dagewesene Positionierungs- und Nachführgenauigkeit sicher zu stellen, und high-performance Servomotoren und Treiber und Hochgeschwindigkeits-Positionierung zu ermöglichen.
Diese radikale Leistungsverbesserung im Vergleich zu früheren Technologien erlaubt auch eine radikale Veränderung in den Arbeitsabläufen bei Beobachtung und Astrofotografie.
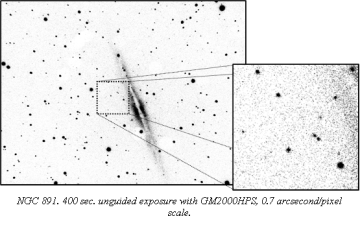
In den meisten Anwendungen – inklusive Deep-Sky Aufnahmen mit langer Belichtungszeit – ist kein Auto Guiding mehr nötig.
Die Positionierungsgenauigkeit erlaubt es sicher zu sein, dass, sobald die Montierung richtig eingerichtet ist, Objekte im kleinsten Sichtfeld zentriert sind – selbst mit einem mobilen Setup auf einer abgelegenen Lichtung oder auf einem Berg. Weiterhin erlaubt die interne Elektronik der Montierung, fast alles ohne eine externen PC durchzuführen.
Die absolut Encoder bieten hohe Genauigkeit und Subbogensekunden Feedback auf die Bewegung der Montierung. Die Absolut-Encoder rendern die Axe „live“, ohne mit externen Kräften, wie Wind und Vibrationen oder versehentlichem Kontakt entgegen zu wirken. Weiterhin wird dieses Feedback unabhängig von Nullstellungs- oder Referenzierungs-Vorgang geliefert. Das bedeutet, die Elektronik kennt immer die Position der Montierung.
So ist es möglich, die Montierung abgeschaltet mit gelösten Kupplungen frei zu bewegen, und trotzdem weiß die Montierung beim Start in welche Richtung das Teleskop schaut.
Man kann die Montierung auch effektiv als manuelles Dobson Teleskop nutzen, bei bleibender Subbogensekunden Genauigkeit der Encoder.
Das bedeutet eine leichte Bedienung im Feld, da das Einrichten deutlich schneller möglich ist.
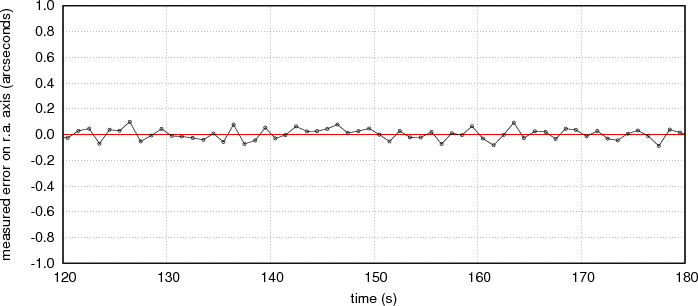
Im Hinblick auf die Rektaszensionsachse wird nahezu der gesamte mechanische Fehler des Untersetzungsgetriebes eliminiert.
Nicht nur der sogenannte „periodische Fehler“ aus periodischen Unregelmäßigkeiten auf Grund von Unregelmäßigkeiten in der Fertigung und Montage der Schnecke, sondern auch nicht periodische Fehler auf Grund von Unvollkommenheiten im Schneckenrad, der Lagerung, oder dem Riemen wird eliminiert.
Im Hinblick auf die Deklinationsachse kann es wirken, als ob das Encoder System weniger wichtig ist, da es hier keine Sternenverfolgungsachsen-Bewegung gibt. In der Realität ist es aber ein kritischer Bestandteil bei der Sternenverfolgung. Wenn Brechung, Teleskop- und Montierungsbiegung usw. ausgeglichen werden soll, dann muss die Deklinationsache sehr langsam bewegt werden.
Während die Rektaszensionsachse sich immer mit derselben Geschwindigkeit bewegt (plus/minus ein paar kleinen Korrekturen), bewegt sich die Deklinationsachse immer mit nahezu null Geschwindigkeit, mit gelegentlicher Umkehr der Bewegungsrichtung.
Das bedeutet mechanisches Spiel, Riemenbiegungen und Reibkräfte zeigen sich in der Deklinationsachse, und man kann sich nicht darauf verlassen, dass die „Periodic Error Correction“ dies ausgleicht.
Tricks, um die Auswirkungen dieser Kräfte zu reduzieren, erfordern eine sehr geringe Vorspannung auf der Schnecke mit dem Risiko unkontrollierter Bewegungen bei kleinsten, von außen wirkenden Kräften, elende Kalibrierung von Software Rückschlagkompensation und manuelles Einstellen des Eingriffsgetriebes. Oder, vielleicht das Erzwingen von kleinen Ausrichtungsfehlern, um die Auto Guiding Korrektur immer in dieselbe Richtung zu zwingen. Folglich ist es sowohl auf der Rektaszensionsachse als auch auf der Deklinationsachse wichtig, direkt einen Encoder montiert zu haben.
Die Aufgabe, astronomische Objekte zu verfolgen kann in mehrere Teil-Aufgaben geteilt werden, die wir im Folgenden einzeln erörtern werden.
Um eine Subbogensekunden Trackinggenauigkeit mit HPS Montierungen zu erreichen, müssen all diese Aspekte in Betracht gezogen werden. Außerdem zeigen sich viele „subtile“ Auswirkungen, und auch diese müssen beachtet werden.
Eine ideale äquatoriale Montierung hat ihre Rektaszensionsachse direkt auf die Himmelspole ausgerichtet. Wenn ein Fehler vorliegt, dann wird die Montierung unterschiedliche Positionierungs- und Trackingfehler in beiden Achsen erfahren. Mit einer typischen Montierung, die Objekte mit einer konstanten Bewegung der Rektaszensionsachse verfolgt, ist es von höchster Wichtigkeit, diesen Idealzustand zu erreichen.
Es gibt viele Methoden, dies zu erreichen – von der universalen (aber langwierigen) Bigourdan-Methode zu iterativen Methoden, die die Möglichkeiten computerisierter Montierungen mit sich bringen, bis hin zur traditionellen Kochab-Methode (die schwieriger umzusetzen ist als man erwartet).
Viele computerisierte Montierungen erlauben die Ausrichtung auf ein, zwei oder drei Sterne mit sinkender Unsicherheit für die Richtigkeit der ursprünglichen Ausrichtung, um so die polare Fehlausrichtung zu berechnen.
Diese Information wird dann zur Ausrichtung auf Objekte verwendet. Die HPS Montierung tut dies genau so, geht aber einen Schritt weiter und verwendet diese Information auch zur Korrektur beim Tracking. Das bedeutet, dass Objekte auch ohne Himmelspol-Ausrichtung korrekt getrackt werden können.
Selbstverständlich möchten Sie vielleicht sichergehen, eine vernünftige Ausrichtung zu haben, um bei langen Aufnahmen Feldrotation zu vermeiden.
Viele Funktionen werden von der 10Micron Firmware bereitgestellt: selbst die Anzahl der Umdrehungen, die an Azimut- und Altimuth-Einstellrädern gemacht werden müssen, wird angegeben.
Daher haben wir das Polsucherfernrohr eliminiert, was der mechanischen Steifigkeit der Montierung zugute kommt, da die anfängliche Ausrichtung auch bei einer um viele Grad vom Pol abweichenden Montierung möglich ist. Die ungefähre Zentrierung von zwei hellen Sternen im Okular (sogar mit manuellen Bewegungen wie bei einem Dobson) und die anschließende Zentrierung eines dritten Sterns mit den Verstellhebeln ist viel schneller als die Ausrichtung des typischen Polsuchers mit Datum und Uhrzeit, die Kompensation des Längengrads und das Einstellen des richtigen Sternmusters für die eigene Hemisphäre in dessen zu kleinem Gesichtsfeld.
All dies erfordert eine genaue Kenntnis der Zeit und der Position auf der Erde. Wenn Sie planen, die Ausrichtung wiederzuverwenden (z.B.: wenn man in einem Observatorium ist), muss die Uhr der Montierung genau synchronisiert und die Koordinaten der Position sehr präzise sein. Aus diesem Grund ist es neben dem Keypad oder einem externen PC auch möglich, diese Daten mit dem optionale GPS Modul bereitzustellen.
Modellierung der Orientierung des Teleskops auf der Montierung
Selbstverständlich wird die Achse des Teleskops nicht perfekt senkrecht zur Deklinationsachse stehen, und sie wird nicht perfekt mit dem Nullwinkel des Absolut-Encoders ausgerichtet sein. Wenn der dritte Stern zum Ausrichtungsverfahren hinzugefügt wird, werden diese Fehler automatisch berechnet und korrigiert.
Wir wissen, dass keine Mechanik ideal ist. Selbst mit hochgenauen Encodern direkt auf den Achsen montiert, haben wir immer noch das Problem der mechanischen Biegung. Bei den meisten Montierungen werden die mechanischen Fehler nicht auf der Softwareebene angesprochen. Selbstverständlich können mechanische Fehler mit vorsichtigem Design und Fertigung minimiert werden.
Zum Beispiel kann eine Deformation von fünf tausendstel Millimeter an einem der Beine eines typischen Dreibein Stativs eine Bogensekunde Abweichung erzeugen.
Eine solche Verformung kann leicht durch die Bewegung um das Baryzentrum eines nicht perfekt ausbalancierten Teleskops verursacht werden.
Das beste was wir als tun können, ist ein Modell zu erstellen, das die mechanische Biegung der Montierung und des Teleskops berücksichtigt. Dies geschieht durch Vergleich der verschiedenen Punkte am Himmel mit der Anzeige des Encoders (d.h. mit dem absoluten Winkel der an den Achsen der Montierung eingestellt ist). Mit ausreichend Punkten kann die Biegung gut modelliert werden, um eine hochpräzise Ausrichtung zu ermöglichen. Soweit wir wissen, erlaubt dies keine Montierung auf dem Markt ohne die Verwendung eines externen Computers. Bei 10Micron kann es so einfach sein wie das Hinzufügen von Sternen zu denen die bereits für die erste Ausrichtung verwendet wurden.
Natürlich kann dieser Vorgang mit externen Tools, die vordefinierte Punkte am Himmel anfahren, ein Bild machen und dann mittels „Plate Solving“ die gemessenen Koordinaten an die Montierung zurückgeben, automatisiert werden.
Es können bis zu 100 Ausrichtungssterne/ -punkte für diese Aufgabe verwendet werden. Dank der hohen Ausrichtungsgeschwindigkeit nimmt es erstaunlich wenig Zeit in Anspruch.
Das alles funktioniert natürlich nur wenn die mechanischen Fehler reproduzierbar sind.
Dies bedeutet, mechanische Biegung kann zwar hervorragend modelliert werden, mechanisches Spiel oder Umkehrspiel allerdings nicht.
Die On Axis Encoder stellen sicher, dass bei der Erstellung eines Pointing-Modells Tracking oder Ausrichten auf Objekte kein Spiel in der Montierung in die Quere kommt. Die Aufgabe, schwankende Spiegel, lose Fokussierter, Rohre, usw. zu eliminieren bleiben bei Ihnen.
Die Erdatmosphäre krümmt das Licht von Astronomischen Objekten abhängig von der Luftdichte.
Dies wird als „atmosphärische Brechung“ bezeichnet. Bei traditionellen Montierungen ist es oft ratsam, die Rektaszensionsachse auf den gebrochenen Himmelspol auszurichten und eine spezielle Nachführgeschwindigkeit (die sogenannte „Königsgeschwindigkeit“) einzustellen, die den scheinbaren Geschwindigkeitsunterschied aufgrund der Refraktion (nur in Rektaszension) kompensiert.
10Micron-Montierungen ermöglichen die Einstellung des barometrischen Drucks und der atmosphärischen Temperatur und können diese auch während einer Beobachtungssitzung ändern, um ihre Ausrichtung und Nachführung kontinuierlich zu korrigieren, und um atmosphärische Veränderungen zu berücksichtigen. Dies kann manuell über die Tastatur, oder über einen externen PC erfolgen.
Wie jeder weiß, dreht sich die Erde im Verhältnis zu den astronomischen Objekten. Ihre Hauptbewegung ist bei weitem die tägliche Rotation. Um als "äquatoriale Montierung" bezeichnet zu werden, reicht es daher oft aus, eine Rotation mit konstanter Geschwindigkeit um die Rektaszensionsachse zu gewährleisten. Dieser Rhythmus wird in der Regel von einer Quarzuhr vorgegeben und sollte daher einigermaßen genau sein. Was viele nicht wissen, ist, dass die typischen Quarzoszillatoren, die in der Elektronik (und auch in Ihrem PC) verwendet werden, nicht temperaturkompensiert sind. Außerdem sind sie ohnehin nicht besonders genau. Bei einer ziemlich typischen Temperatur von -5 °C (23 °F), die für astronomische Beobachtungen nicht selten ist, kann ein typischer Quarz einen Fehler von mehreren zehn Teilen pro Million (ppm) aufweisen. Üblicherweise werden Fehler von 20 oder 30 ppm beobachtet, was zu Fehlern in der Rektaszension führt, die sich auf etwa 2,5 Sekunden pro Tag summieren, was mehr als eine Bogensekunde pro Stunde bedeutet.
Der Verlust an Ausrichtungsgenauigkeit in einer 12-stündigen Winternacht würde etwa 20 Bogensekunden betragen, und noch viel mehr, wenn die Montierung abgeschaltet und Tage später wieder eingeschaltet wird. Dies kann korrigiert werden, indem die Montierung immer mit einer externen Zeitquelle synchronisiert wird, z. B. mit einem Standard-PC, dessen Uhr mit den NIST-Zeitservern synchronisiert ist, oder mit dem optionalen, bereits angesprochenen GPS-Modul. Ab sofort verfügen alle unsere Motortreiber über eine batteriegepufferte Uhr mit Temperaturkompensation, die die Zeit mit einer Genauigkeit von 3,5 ppm von -40°C bis +40°C (-40°F bis +104°F) halten kann.
Eine viel langsamere, aber dennoch grundlegende Bewegung ist die Präzession der Tagundnachtgleichen. Wenn man die Präzession nicht modelliert, ist man gezwungen, Standardkoordinaten zu verwenden (z. B. bei der Ausrichtung).
Manch einer mag denken, wenn man eine Ausrichtung mit J2000.0-Koordinaten vornimmt, dann sollte man auch in der Lage sein, Objekte mit J2000.0-Koordinaten auszurichten: Nichts könnte weiter von der Realität entfernt sein! Die Präzession ändert die Richtung der Rotationsachse der Erde, d. h. des Himmelspols, so dass die Ausrichtung für einige Minuten funktionieren würde – danach wäre die Genauigkeit der Ausrichtung zerstört.
Einige Systeme berücksichtigen die Präzession in ihren Datenbanken nicht. Standardmäßig arbeiten 10micron-Montierungen in JNOW, wenn sie mit der Außenwelt kommunizieren, d.h. die Koordinaten, die Sie auf dem Tastenfeld ablesen und einstellen, beziehen sich auf die wahre Tagundnachtgleiche des Beobachtungsdatums. Aber alles wird in der Firmware berücksichtigt. Ja, sogar Nutation und Lichtabweichung.
Ein weiter Faktor, der die Genauigkeit der Montierung über längere Zeit beeinflussen kann, ist die Veränderung in der Rotationsgeschwindigkeit der Erde.
Was wir die UTC Zeit nennen, ist nur eine Näherung an den Rotationswinkel der Erde.
Der Drehwinkel der Erde wird mit UT1 gemessen, wenn man die Polwanderung und die jahreszeitlichen Schwankungen vernachlässigt (die ohnehin weniger als eine Bogensekunde ausmachen).
UTC basiert auf Atomuhren, und manchmal wird eine so genannte "Schaltsekunde" eingefügt, um die Abweichung zu UT1 auf 0,9 Sekunden zu beschränken.
Wenn Sie also UT1 mit UTC approximieren, können Sie eine Abweichung von bis zu 14 Bogensekunden in Ihre Ausrichtungsgenauigkeit einbringen. Diese Differenz ändert sich nur sehr langsam, so dass die Verschlechterung des Ausrichtungsmodells (einfach aufgrund des Kriechens des Geländes und anderer "sehr langsamer" Dinge) immer schneller ist als diese Änderung, und Sie werden in der Praxis kein Problem feststellen.
Aber wenn die Schaltsekunde eingefügt wird, gibt es einen plötzlichen Sprung in den Koordinaten. Deshalb werden wir ab Firmware-Revision 2.13.1 eine vollständige Berücksichtigung von UTC, UT1 und Schaltsekunden einführen.
Also wenn UT1 mit UTC angenähert wird dann schafft man bis zu 14 weiter Bogensekunden Abweichung in die Positionier Genauigkeit.
Dieser Unterschied verändert sich nur sehr langsam und in der Praxis wird das Problem nicht bemerkbar.
Aber wenn die Schaltsekunde eingefügt wird, haben Sie einen plötzlichen Sprung in den Koordinaten. Daher werden wir eine vollständige Abrechnung von UTC, UT1 und Schaltsekunden seit der Firmware-Revision 2.13.1 implementieren. Aber wenn die Schaltsekunde eingefügt wird, gibt es einen plötzlichen Sprung in den Koordinaten. Wir werden also eine vollständige Abrechnung von UTC, UT1 und Schaltsekunden seit Firmware-Revision 2.13.1 implementieren.
Eine ganze Reihe von astronomischen Objekten weist eine sichtbare Bewegung auf. Planeten, Asteroiden, Kometen und auch künstliche Satelliten der Erde. Die Firmware der 10micron-Montierung kann die Bewegung all dieser Objekte direkt aus ihren Bahnparametern berechnen (außer bei Planeten müssen Sie die Bahnparameter in die Montierung hochladen: Sie können dies tun, bevor Sie zu Ihrem bevorzugten Beobachtungsort aufbrechen). Künstliche Satelliten werden über eine spezielle Funktion nachgeführt, die wir Ihnen gerne vorstellen möchten. Objekte des Sonnensystems werden automatisch auf beiden Achsen nachgeführt, wenn Sie die Einstellung "Objekt folgen" aktiviert lassen. Bitte beachten Sie, dass der Mond eine merkliche Bewegung in Deklination hat, die von vielen Montierungen nicht berücksichtigt wird, selbst wenn die "Mondnachführgeschwindigkeit" ausgewählt ist.
Autoguiding ist einfacher... – für den Montierungshersteller. Für den Anwender bedeutet Autoguiding zusätzlichen Ärger. Wenn Sie ein externes Guider-Scope verwenden, bedeutet das, dass Sie nicht alle Biegungen zwischen den beiden Instrumenten kompensieren können, und dass Sie zusätzliche, schwere Ausrüstung benötigen. Wenn Sie eine spezielle Guider-Kamera verwenden, bedeutet dies zusätzliche Verkabelung, Software-Installation und Einrichtung. In jedem Fall bedeutet es zusätzlichen Aufwand bei der Suche nach geeigneten Leitsternen, bei der Suche nach angepassten Parametern der Guider-Software und bei der Kalibrierung. HPS-Montierungen können während der Dämmerung auf helle Sterne ausgerichtet werden, dann kann jede Sekunde der Dunkelheit für die Aufnahme genutzt werden. Außerdem ist Autoguiding nicht immer möglich. Die typische Situation ist die Abbildung eines schwachen, sich schnell bewegenden Kometen. Wenn Sie dennoch Autoguiding wollen/brauchen, bieten HPS-Montierungen einen Standard ST4-Anschluss, sowie alle üblichen Einstellungen und Steuerungen per Remote-Software.
Die HPS-Montierungen verfügen über eine sehr reichhaltige Objektdatenbank, die nicht nur die klassischen Messier- und NGC/IC-Kataloge umfasst, sondern auch viele Kataloge von Sternen, einschließlich Veränderlichen- und Doppelsternen, sowie von Deep-Sky-Objekten. Auch ein Katalog von Mondmerkmalen ist verfügbar und dank der hohen Pointing-Genauigkeit nützlich.
Die hohe Geschwindigkeit der Montierung ist – über die Beschleunigung der Ausrichtungsvorgänge hinaus – für das schnelle Einfangen von Satelliten (besonders nach einem Meridiandurchgang) notwendig. Darüber hinaus hilft sie, den Zeitverlust bei Forschungsanwendungen zu reduzieren, indem sie die Datenmenge erhöht, die in den oft kurzen Beobachtungsnächten gewonnen werden kann.
Die HPS-Halterungen bieten ein reichhaltiges System an Zubehör für die Montage verschiedener Instrumente. Sogar mehrere Instrumente können an einer einzigen Montierung befestigt werden, um immer die richtige Bildgebungsausrüstung bereit zu haben. Da das Pointing- und Tracking-Modell vom jeweiligen Instrument abhängt (die Biegung ist unterschiedlich), ermöglicht die Montierung verschiedene Modelle – eines für jedes Instrument – die im internen Speicher gespeichert und bei Bedarf wieder geladen werden können.
Eine weitere nützliche Funktion – besonders für schwerere Montierungen – ist die elektronische Auswuchtfunktion. Mit dieser Funktion können Sie die Unwucht der Instrumentierung messen und entsprechend ausgleichen. Die hohe Geschwindigkeit ist auch sehr nützlich, um diesen Vorgang zu beschleunigen.
Die HPS-Halterungen bieten eine Vielzahl von Anschlussmöglichkeiten. Während Sie die traditionelle RS-232-Verbindung wählen können, um die Elektronik von einem externen PC aus zu steuern, ziehen Sie es heute vielleicht vor, sie für die direkte Steuerung einer computergesteuerten Kuppel zu verwenden. Die Firmware liefert alle relevanten Berechnungen auch für außermittig montierte Montierungen und mit Versatz montierte Instrumente. Der GPS-Anschluss dient auch als zusätzlicher RS-232-Anschluss, wenn Sie das GPS nicht verwenden. Der beste Weg, die Montierung mit Ihrem PC zu verbinden, ist jedoch die LAN-Verbindung über TCP/IP oder die drahtlose Verbindung. Die Montierung kann sich mit einem bestehenden WLAN verbinden, oder sie kann als Hotspot verwendet werden, mit dem sich Ihr PC, Tablet oder Smartphone verbinden kann.
Die LAN-Verbindung bietet eine bessere Hochspannungstoleranz als die typische RS-232-Verbindung; noch besser ist es mit dem kabellosen WLAN. Bei abgelegenen, blitzgefährdeten Sternwarten kann dies den Unterschied zwischen einer funktionstüchtigen und einer durchgebrannten Elektronik ausmachen!
Die Montierung unterstützt bis zu zehn gleichzeitige TCP/IP-Verbindungen, so dass Sie verschiedene Software, aber auch verschiedene Geräte gleichzeitig nutzen können. 10micron stellt einen ASCOM-Treiber für Windows zur Verfügung. Wenn Sie allerdings Ihr eigenes Steuerungssystem implementieren wollen, stellen wir den Befehlssatz zur Verfügung, der sowohl auf den RS-232-, LAN- und WLAN-Verbindungen verwendet werden kann. Der Befehlssatz ist weitgehend LX200-kompatibel, enthält aber viele weitere Funktionen und Betriebsarten. Im Remote-Betrieb werden Sie auch die zusätzliche Sicherheit durch die Absolut Encoder zu schätzen wissen: Sie verlieren auf keinen Fall Ihre Ausrichtung, auch nicht bei durchrutschenden Kupplungen.
Die HPS-Montierungen sind in der Lage, bis zu 30° jenseits des Meridians zu arbeiten – und zwar in beiden Richtungen (d.h. mit der Gegengewichtsstange oben und dem Teleskop unten). Dies erlaubt mindestens einen Bogen von 60° für die Nachführung jedes Objekts, was einer Nachführzeit von mindestens vier Stunden für Objekte, die den Meridian überqueren, entspricht (vorausgesetzt, das Objekt setzt oder stößt nicht an eine andere Grenze). Dieser Wert ist von 0° bis 30° konfigurierbar, um die maximale Flexibilität zu erreichen. Die Montierung warnt Sie, wenn sie an die Trackinggrenze stößt; an der Grenze wird das Tracking beendet. Sie müssen das Objekt erneut ausrichten, um eine Meridianumkehr zu erzwingen.