Hier erfahren Sie mehr über die Technik der 10Micron Montierungen und Details zu den unterschiedlichen Bauarten von astrofotografischen Montierungen allgemein.
“Endlich mal Abendbrot essen während der Belichtung” Bernd Hartwig
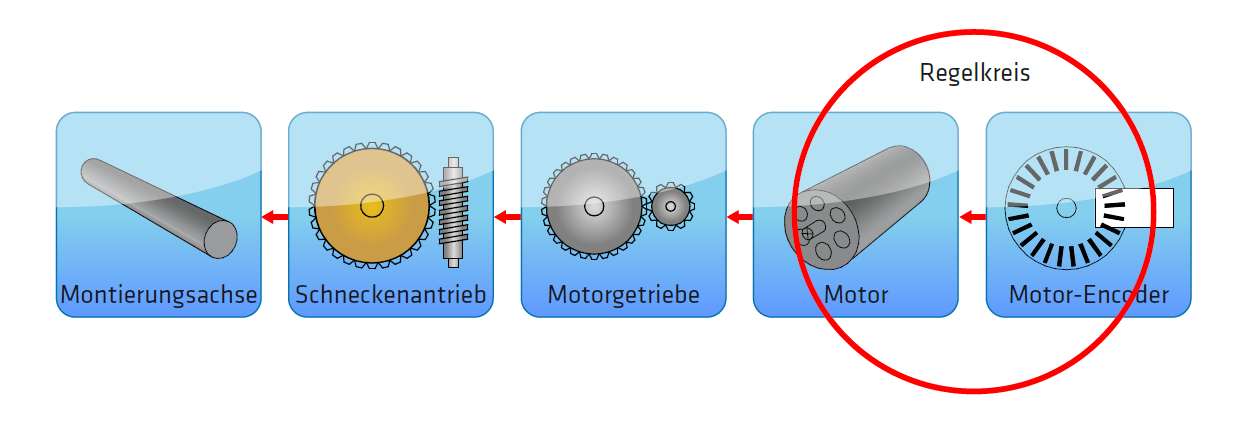
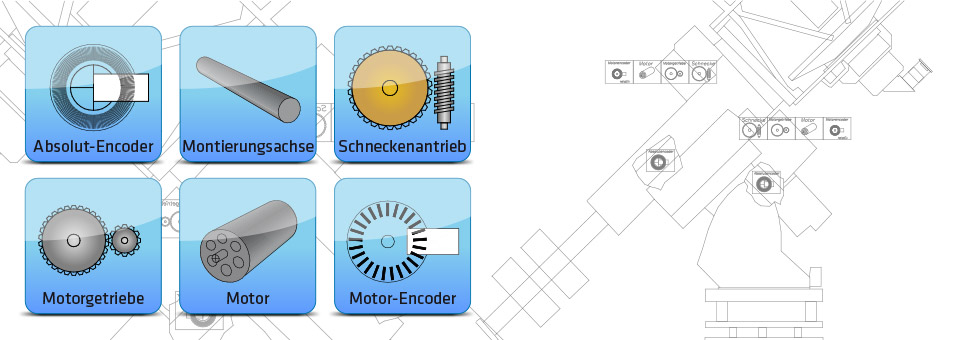
10Micron QCI Montierungen werden “konventionell” über Schnecke und Schneckenrad mittels Servo-Motoren (Gleichstrom-Motore mit direkt angeflanschtem Motorencoder / Encoder = Positionswinkelgeber) angetrieben (siehe Grafik).
VORTEIL:
Die Achsen werden durch die Schnecke “gehemmt”. D.h. wenn die Achsklemmung angezogen ist, bewegt sich die Montierung nicht – auch nicht bei grobem Ungleichgewicht oder abgeschaltetem Strom. Dieses System ist seit Jahrzehnten bewährt und bietet für die meisten astrofotografischen Tätigkeiten die nötige Exaktheit. Die ohnehin hochpräzise gefertigten Antriebe der 10Micron Montierungen werden von Hand gepaart und zentriert, der mechanische Fehler beläuft sich auf höchstens +/- 4 Bogensekunden und kann mit der moderneren PEC Elektronik (Periodic Error Control) der 10Micron QCI in den Bereich von +/-1,5 Bogensekunden gedrückt werden. Das ist deutlich unterhalb der durch Seeing Effekte verursachten Unschärfe und ermöglicht Tracking ohne Autoguider im Bereich von einigen Minuten bei mittleren Brennweiten.
Wie alle schneckengetriebenen Montierungen haben dabei auch die 10Micron Montierungen den Vorteil, dass sie sehr schnell aufgebaut und einsatzbereit sind und sich damit gut für den mobilen Betrieb eignen.
NACHTEIL:
Bei langen Belichtungsintervallen über zehn Minuten und bei langen Brennweiten ist unabänderlich ein Autoguider erforderlich. Ferner gibt es durch das Schneckengetriebe ein “mechanisches Grundrauschen”, das sich im Bereich von +/- 0,5 Bogensekunden bewegt. Ein weiterer Nachteil aller schneckengetriebenen Montierungen jedes beliebigen Herstellers ist, dass bei plötzlichen Nachführkorrektur-Impulsen ein “Stiction” (static friction) genannter Effekt eintritt, ein “Losbrechmoment” welcher zu “Sprüngen” im Bereich von ganzen Bogensekunden führen kann.
Bei allen 10Micron Montierungen wird dieser Stiction-Effekt durch eine ausgeklügelte Motoransteuerung mittels der Firmware im Linux-Onboard-Computer nahezu vollständig kompensiert.
(siehe: www.skytrip.de)
“Vom Abziehen des Zündschlüssels bis zur ersten Langzeitbelichtung brauche ich mit meiner GM 2000 ganze 35 Minuten – inklusive dem Einrichten des Autoguiders“
Anmerkung zum Kundenzitat:
Autoguiding hat in den letzten Jahren durch Stand-Alone-Guider, hochempfindliche Guiding Kameras, stabile Off-Axis Guider und sehr gute Software seinen Schrecken verloren und ist mittlerweile mit relativ wenig Aufwand verlässlich zu realisieren. Das Einrichten, Kalibrieren und Starten des Autoguiders (Hard- und Software) dauert nur wenige Minuten. Dieser Regelkreis ist eine simple und zuverlässige Lösung für ein komplexes Problem. Bildergebnisse wie die auf der Website von Mario Weigand sind dafür der Beweis.

Diese Montierungen werden seit wenigen Jahren von verschiedenen Herstellern angeboten. Hier gibt es keine Schnecke und kein Schneckenrad, kein Vorgetriebe und keinen Motorencoder. Die Achse selbst wird zum Motor. Die Bewegung, die Feinpositionierung und die Haltekraft wird ausschließlich über die elektronisch hochkomplexe Manipulation der Motor-Magnetfelder bewirkt. Um dies zu ermöglichen sitzen auf beiden Achsen zusätzlich jeweils hochgenaue Achsencoder.
VORTEIL:
Diese Montierungsbauart produziert die sanftesten Trackingkurven und geringsten Fehler (nahe null Bogensekunden) – sobald sie sorgfältig aufgestellt und eingerichtet ist. Damit werden lange Belichtungszeiten und extreme Exaktheit auch ohne einen Autoguider selbst bei langen Brennweiten möglich.
NACHTEIL:
Die Parametrierung ist kompliziert – insbesondere bei einer mobil betriebenen Montierung – und nicht durch jedermann sofort beherrschbar. Die Einstellung der Motorparameter, sowie das Erstellen eines geeigneten Positionierungsmodelles dauert bei mobilen Direct-Drive-Montierungen lt. diversen Anwenderberichten im Internet auch mit Übung mindestens 1,5 Std.
So geht im mobilen Betrieb ein Mehrfaches an Beobachtungs- bzw. Belichtungszeit verloren gegenüber der Autoguider-Einrichtung. Bei jeder Gewichtsveränderung am Fernrohr (Einsetzen einer anderen Kamera etc.) wird es erforderlich, die Pointierungsparameter neu zu definieren. Ferner führt das Ausschalten oder der Ausfall der Energiezufuhr dazu, dass die Achsen bei Wegfall des hemmenden Magnetfeldes völlig frei der Schwerkraft folgen. Die Instrumentenausrüstung muss folglich extrem gut balanciert sein um Schadensfälle zu vermeiden. Anders als beim mechanisch selbsthemmenden Getriebe muss hier jegliches Ungleichgewicht durch Beeinflussung der Motormagnetfelder ausgeglichen werden – bereits ein leichtes Ungleichgewicht kann zum Aussetzen des Motors führen. Desweiteren benötigt das komplizierte Motormanagement dieser Montierungen einen externen PC/Laptop zur Ansteuerung.
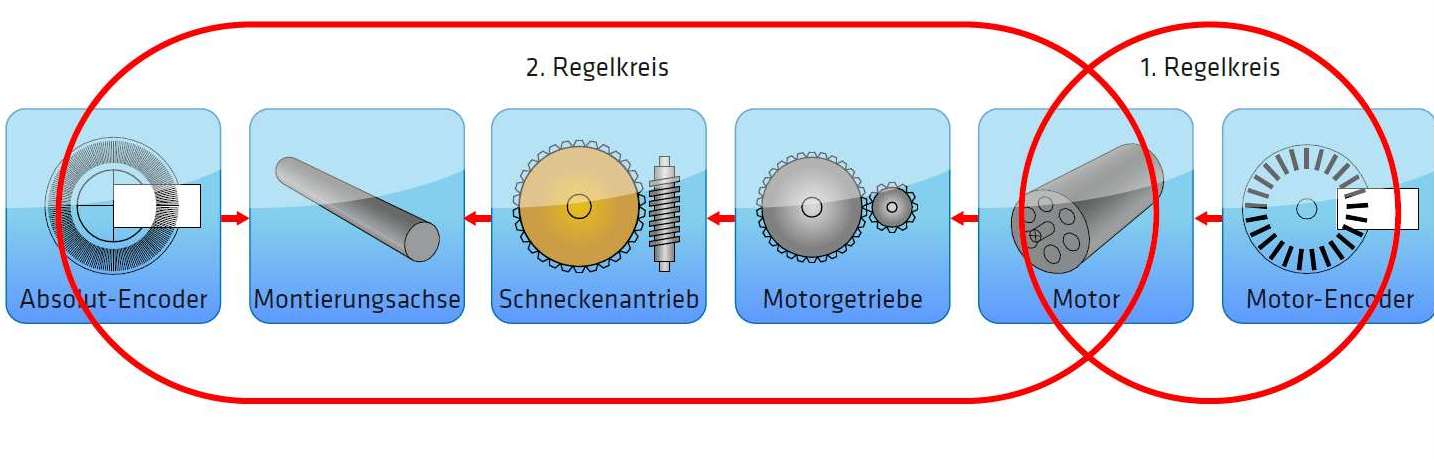
10Micron HPS (High Precision and Speed) Montierungen besitzen die gleiche Mechanik wie 10Micron QCI Montierungen. Zusätzlich zu den üblichen Motor-Encodern sind jedoch direkt an der Stunden- und Deklinationsachse jeweils hochgenaue Absolut-Encoder mit über 10 Millionen Messpunkten kalibriert angebracht. Durch die Kombination von je zwei elektronischen Regelkreisen pro Achse erhält die klassische Montierung in einigen wichtigen Punkten ebenbürtige Eigenschaften wie eine Direct-Drive-Montierung.
VORTEIL:
Man paart die Vorteile einer konventionellen Montierung (selbsthemmendes Getriebe, hohe Haltekraft auch bei Lastwechsel, schnelle Aufstellung, einfaches Handling) mit der Möglichkeit einer über längere Zeit höchst exakten Nachführung ohne Guiding und weiter verbesserten Verfolgungsgenauigkeit bei Satellitengeschwindigkeiten. Dies wäre sonst nur bei direkt angetriebenen Montierungen möglich.
Sämtliche Fehler, die im Antriebsstrang zwischen Motor und Absolutwertgeber auftreten, werden erkannt und sofort behoben. Zum Beispiel: Fehler, die durch unvermeidliche mechanische Ungenauigkeiten verursacht werden; Fehler, die durch die nicht-erratische Biegung der Messgeräte verursacht werden; temperaturbedingte Änderungen des Ansprechverhaltens; der Einfluss der atmosphärischen Brechung in Bezug auf die Temperatur; Feuchtigkeit und Luftdruck - all diese Fehlerquellen werden durch die verschiedenen Kompensationsmodelle, die permanent im Onboard-Speicher der Halterungen gespeichert sind, beseitigt.
Außerdem kennt die Montierung immer ihre Orientierung. Selbst wenn die Achsen per Hand verschoben werden, kennt die Montierung mit absoluter Präzision ihre Position. Auch andere Einflüsse von außen (z.B. Windstöße) werden sogar beim Tracken von Satelliten in Hochgeschwindigkeit zuverlässig kompensiert. Diese Kombination von Regelkonzepten arbeitet unschlagbar robust und “unsichtbar” im Hintergrund, sie erfordert gegenüber der herkömmlichen (QCI) Montierung keine zusätzlichen Benutzereingaben oder Parametrierung und ist genauso einfach im Handling wie diese. Zusätzlich lässt sich diese Montierungsbauart ebenso einfach wie eine 10micron QCI Montierung für besondere Anforderungen (sehr lange Belichtungszeiten) mit Autoguider betreiben.
Kundenzitat Rolf Geissinger, Besitzer einer GM 2000 HPS (siehe: www.stern-fan.de ):
“…der Unterschied ist einfach, dass man eine 10Micron HPS hinstellt und loslegt und sich um das Wesentliche kümmern kann. Dabei ist meine Montierung gar nicht fest aufgestellt. Nur das Stativ steht draußen auf meinem Balkon und wird wechselweise mit verschiedenen Teleskopen betrieben – je nachdem was für ein Projekt ich verfolge. Ich bin ab der Idee fotografieren zu wollen, bis zu dem Moment wo die HPS mit allem aufgebaut ist, in ca. 15-20 min. startklar. In der von mir angegebenen Zeit ist auch die Montierung draussen aufgebaut, initialisiert, eingenordet, elektronisch ausbalanciert, das zum Teleskop passende Pointingmodel ausgewählt usw. Und ebenfalls ist dann aber auch die Teleskop- und Kameramontage, die Verkabelung, der Start der Software und die Fokussierung bereits erledigt. Ich habe ruck zuck zwei bis drei Stunden Photonen gesammelt und bin zeitig genug im Bett um am nächsten Morgen frisch in die Arbeit zu kommen.”
NACHTEIL:
Das oben genannte mechanische Grundrauschen (bei der HPS-Montierung reduziert auf bis zu +/- 0.25 Bogensekunden) lässt sich auch mit den Absolut-Achsencodern nicht völlig zu Null ausgleichen. Dies spielt jedoch aufgrund der geringen Amplitude keine Rolle – auch nicht bei sehr langen Brennweiten und Belichtungen; nicht einmal bei der Satellitennachführung, denn die atmosphärischen Störungseinflüsse (seeing) sind in jedem Fall deutlich größer.